|
Jiaying Fang I'm a first-year Robotics PhD student at Cornell University, co-advised by Professors Hadas Kress-Gazit and Preston Culbertson. My current research focuses on making robotic policies safe, reliable, and interpretable. Previously, I worked with Professor Tapomayukh Bhattacharjee at Cornell on physical human-robot interaction. I received my MS in EE from Stanford University where I was fortunate to have worked with Professor Jeannette Bohg on learning robot policies from human videos; and Professor Allison Okamura on force aware robot policies. In summer 2024, I interned at Intuitive Surgical. Prior to that, I received my BEng (Hons) in EIE from Hong Kong Polytechnic University. |
|
News
|
Publications |
|
|
Embodiment Meets Environment: Toward Context-Aware, Safe Physical Caregiving Robots
Zhanxin Wu, Ruofei Tong, Jiaying Fang, Tapomayukh Bhattacharjee RSS, 2026 project page We propose E2-CARE, a framework that enables context-aware adaptation by representing primitive caregiving skills as interaction templates whose execution is reshaped online. |
|
|
Beyond Failure Recovery: An Engagement-Aware Human-in-the-loop Framework for Robotic Systems
Jiaying Fang, Joyce Yang, Zhanxin Wu, Bohan Yang, Tapomayukh Bhattacharjee RSS, 2026 project page / arXiv We propose Engagement-aware MPC (E-MPC), a user-engagement-aware method that plans interaction to maintain engagement while respecting a workload constraint. |
|
|
Masquerade: Learning from In-the-wild Human Videos using Data-Editing
Marion Lepert*, Jiaying Fang*, Jeannette Bohg ICRA, 2026 project page / arXiv / code We introduce a method that edits in-the-wild egocentric human videos to bridge the visual embodiment gap between humans and robots and then learns a robot policy with these edited videos. |
|
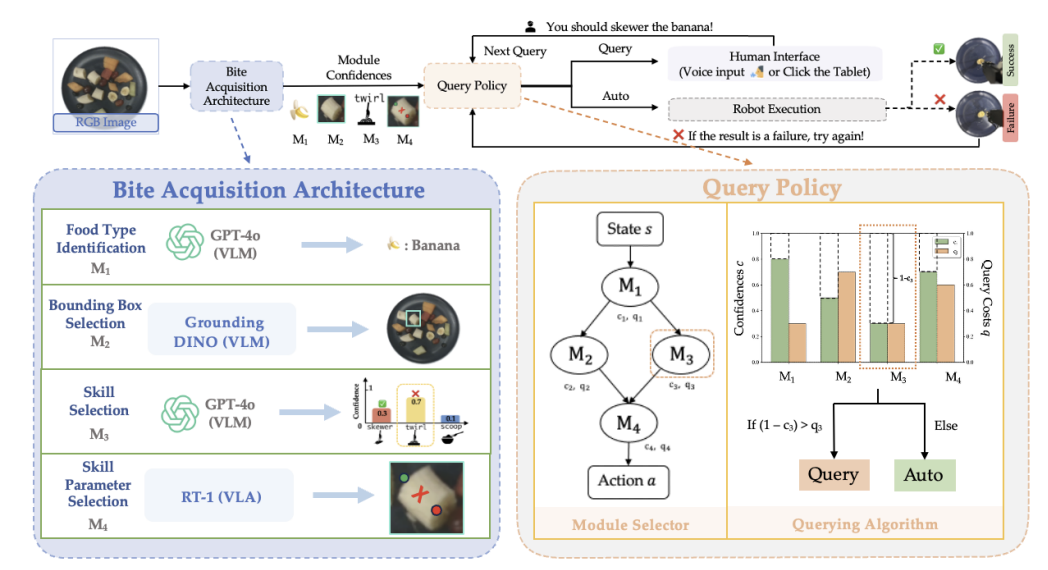
A Human-in-the-Loop Confidence-Aware Failure Recovery Framework for Modular Robot Policies
Rohan Banerjee, Krishna Palempalli*, Bohan Yang*, Jiaying Fang, Alif Abdullah, Tom Silver, Sarah Dean†, Tapomayukh Bhattacharjee† HRI, 2026 project page / arXiv / code A framework for modular policies that combines module-level uncertainty with models of human intervention cost to decide when and which module to query, evaluated on synthetic experiments and a robot-assisted bite acquisition system. |
|
|
Phantom: Training Robots Without Robots Using Only Human Videos
Marion Lepert, Jiaying Fang, Jeannette Bohg CoRL, 2025 project page / arXiv / code We present a scalable framework for training manipulation policies directly from human video demonstrations, requiring no robot data. |
|
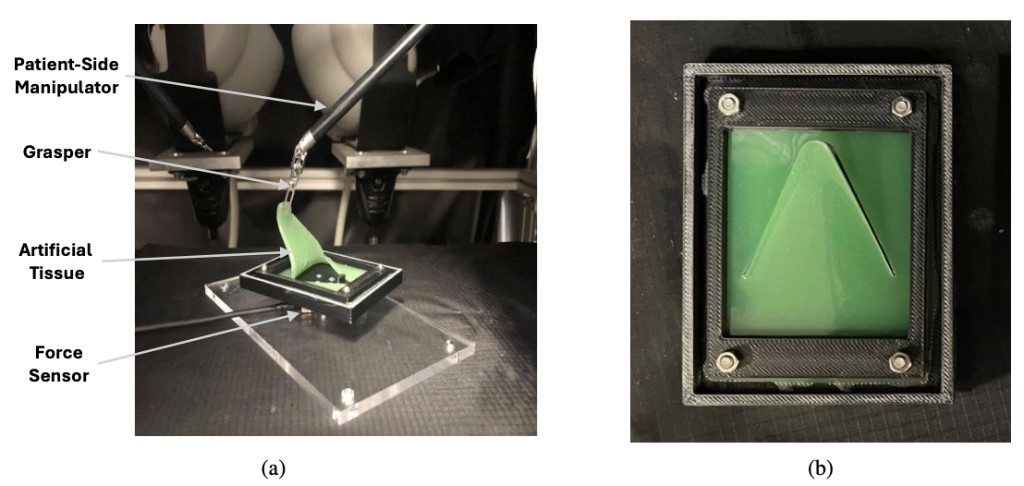
Force-Aware Autonomous Robotic Surgery
Alaa Eldin Abdelaal, Jiaying Fang, Tim N. Reinhart, Jacob A. Mejia, Tony Z. Zhao, Jeannette Bohg, Allison M. Okamura arXiv, 2025 arXiv We study imitation-learning policies for autonomous tissue retraction on the dVRK that use tool-tissue forces alongside vision and kinematics, and show they are more successful and gentler than policies trained without force. |
TeachingCS5750: Foundations of Robotics Graduate Teaching Assistant, Cornell University, Fall 2025 |